
Hackweekend Berlin Oktober 2025
Kreatives Tüfteln der OpenStreetMap-Community
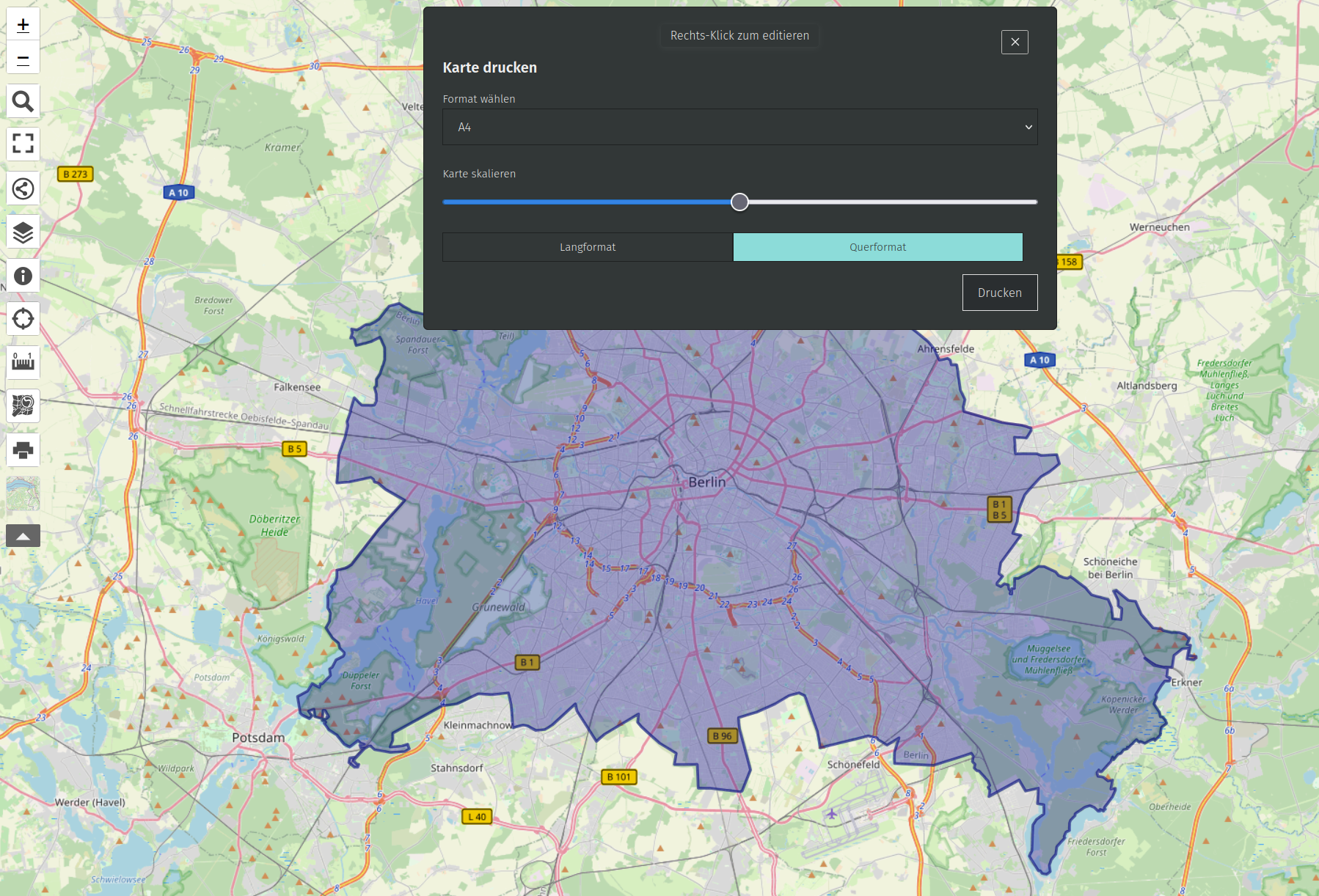
Das Hackweekend Oktober 2025 in Berlin brachte 22 Hacker:innen der OpenStreetMap-Community für ein inspirierendes Wochenende zusammen. Die Veranstaltung bot einen Raum, um Ideen auszutauschen, kreative Projekte voranzutreiben und gemeinsam an neuen Entwicklungen zu arbeiten.
Im Fokus standen nicht nur technische Herausforderungen und Detailfragen, sondern auch Projekte mit sozialem Mehrwert. Diese vielfältigen Ansätze und Themen sorgten dafür, dass das Wochenende eine lebendige Mischung aus Innovation und praktischen Anwendungen bot, die die Community bereichern und inspirieren.
Für alle, die noch nie an einem Hackweekend teilgenommen haben, bietet ein solches Event die perfekte Gelegenheit, die OSM-Community kennenzulernen und selbst aktiv zu werden. Egal ob Du bereits technisch versiert bist oder einfach neugierig auf die Welt der offenen Kartographie, hier findest Du Gleichgesinnte, die ihre Erfahrungen teilen und Dich unterstützen.
Ein besonderer Dank gilt Wikimedia Deutschland, die nicht nur die Räumlichkeiten zur Verfügung stellte, sondern uns auch mit engagierter Betreuung und Verpflegung unterstützte. Durch ihre Förderung entstanden den Teilnehmenden keinerlei Kosten, was das Event für alle offen und zugänglich machte.
Weitere Informationen zum Event finden sich im Wiki.
Wer jetzt neugierig geworden ist und nicht bis nächstes Jahr warten möchte oder wem Berlin zu weit entfernt ist: Im November findet in Karlsruhe das nächste Hackweekend statt, die Anmeldung und Organisation erfolgt über die OSM-Wikiseite.
Einige der Teilnehmenden haben die Gelegenheit genutzt, ihre Arbeit kurz zu beschreiben bzw. zu bebildern.
Tobias: Mapillary-Verkehrszeichen-Layer und Missing Streets
Mapillary-Verkehrszeichen-Layer
Es gibt eine neue Ansicht auf Radinfra/TILDA mit der man die Verkehrszeichen, die Mapillary erkennt, nutzen kann, um Radinfra zu verbessern bzw. sogar fehlende zu finden. Mehr im Blogpost unter https://radinfra.de/posts/2025-verkehrszeichen/
Mapillary Missing Streets
Auf dem Hackathon haben wir eine neue Idee entwickelt, wie das alte Projekt vom Hackathon 2023 endlich mal richtig online gebracht werden kann. Das ist jetzt im Anschluss an den Hackathon passiert. Mehr unter https://www.osm-verkehrswende.org/mapillary/posts/2025-10-12-mapillary-completeness-map/
Danke
Danke, Lars, für die Organisation. Ich habe viele gute Gespräche geführt, gelernt und Dinge voran bringen können.
Daniel: Geo-spatial data on the Berlin LoRa mesh
Geo-spatial data on the Berlin LoRa mesh
https://chaos.social/@djh/115355956195448408

Heltec T114 v2 Hardware mit MeshCore
Using
on cheap Heltec T114 v2 hardware flashed with open source MeshCore v1.9.
Interested in this? Join me at Open Coms @ xHain once a month!
Tuiui: Erste Schritte mit JOSM und Mapping von Reihenhäusern
Erste erfolgreiche Schritte mit JOSM und dem Mapping von Reihenhäusern:
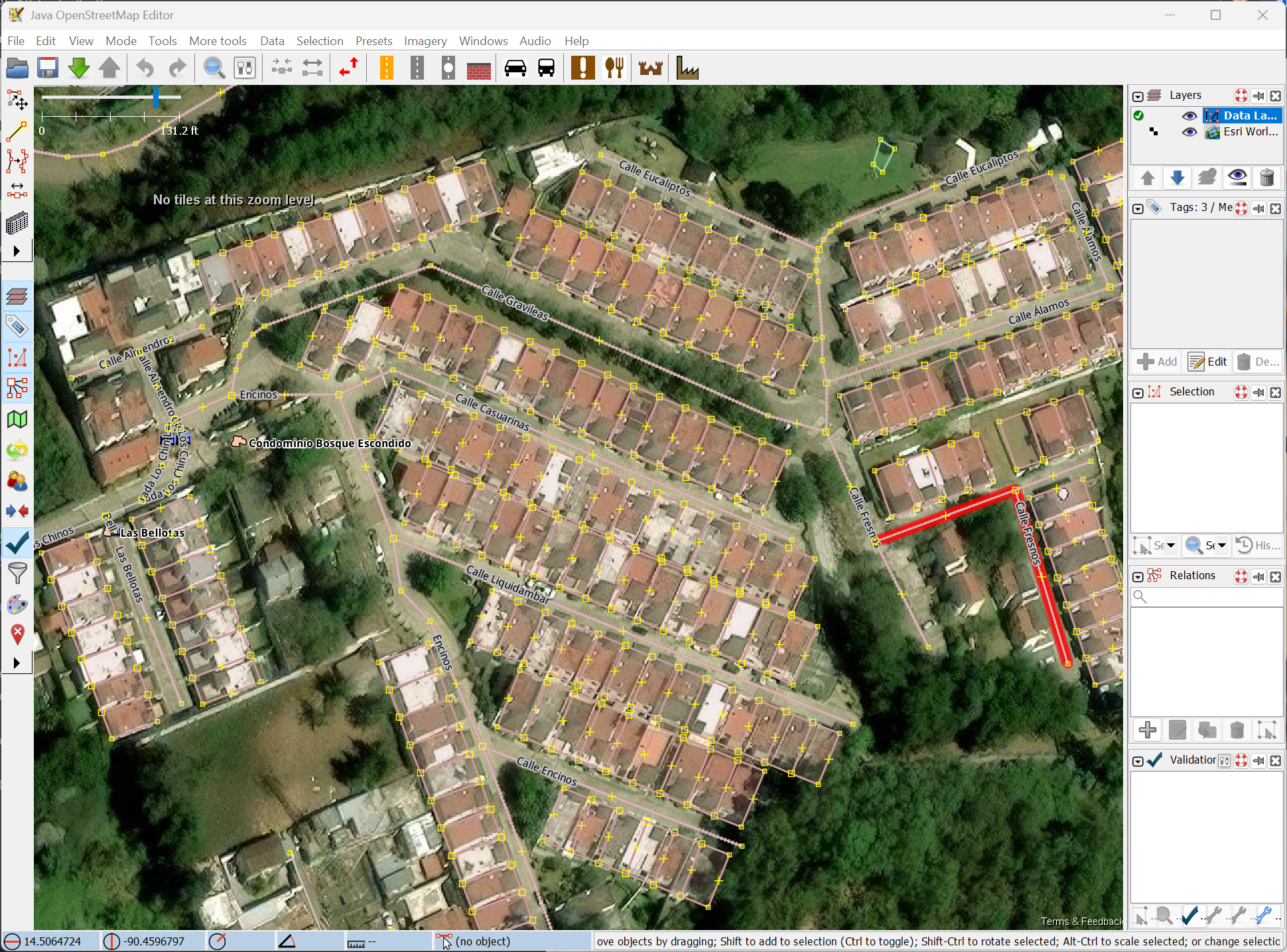
JOSM-Interface beim Mapping von Reihenhäusern
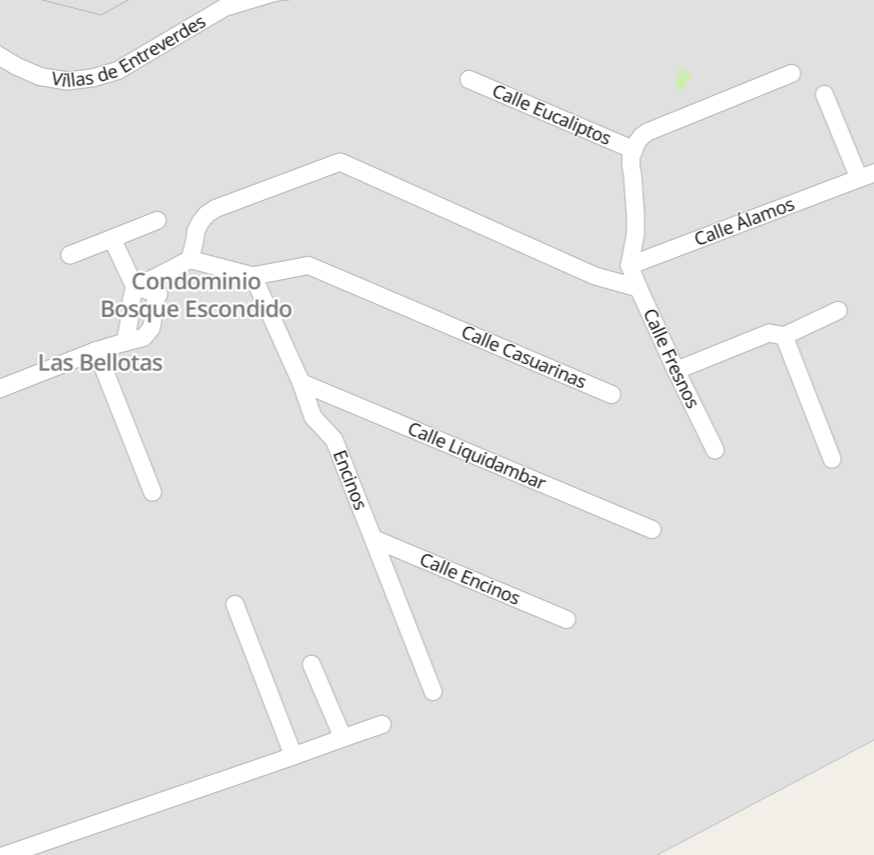
Vorher - ungemappte Reihenhäuser
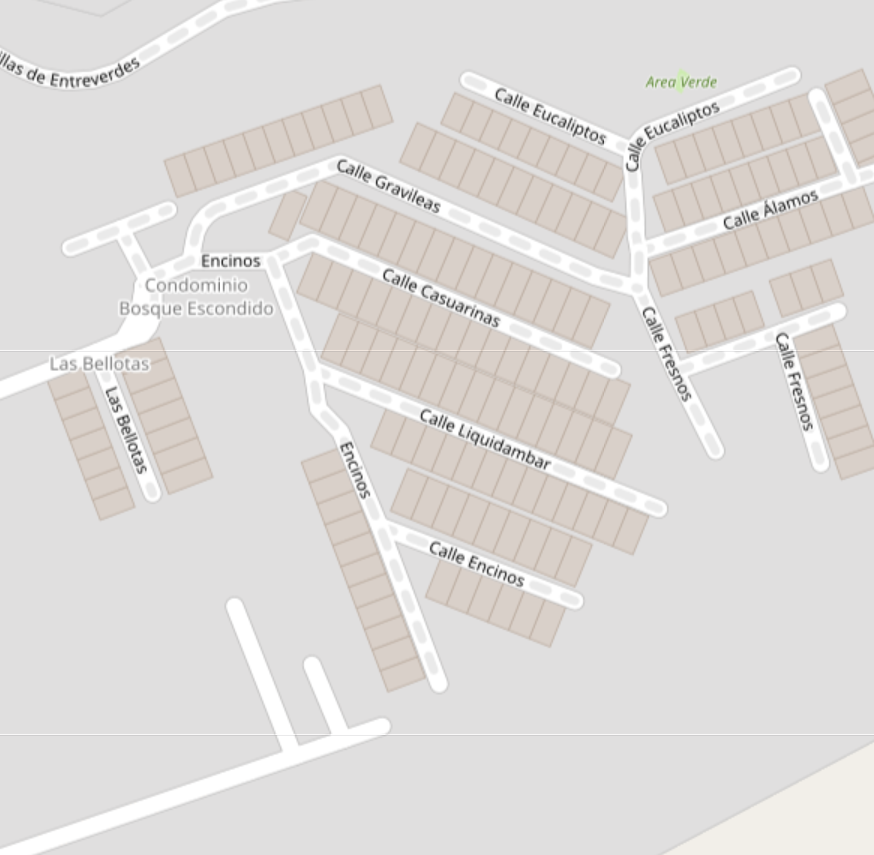
Nachher - detailliert gemappte Reihenhäuser mit korrekten Tags
Alex: OSM-Kameraverleih und Parkraum-Mapping
Professionalisierung des OSM-Kameraverleihs
Mit Tobias, Mlvln und Lars haben wir die “Professionalisierung” des OSM-Kameraverleihs in Richtung Ziellinie gebracht. Wir haben einen standardisierten Leihprozess und einheitliche Kamera-/Versandkisten-Ausstattung vorbereitet. Sobald wir noch ein paar Dinge besorgt haben, kann es mit dem Versand losgehen.
How-To-Map-Parkraum-Videoformat
Mit Mlvln habe ich ein How-To-Map-Parkraum-Videoformat skizziert. Wir wollen ein Videotutorial erstellen für Leute, die in ihrem Stadtteil Parkraumdaten in OSM mit JOSM und dem Street-Parking-Schema erheben und auswerten wollen (siehe auch OSM-Parkraumprojekt).
Jupyter-Notebook für Geoprozessierung
Habe angefangen, mich mit Jupyter-Notebook zu beschäftigen, um bessere Geoprozessierungs-Prototypen basteln zu können. Konkret wollte ich Kopfsteinpflasterpassagen auf Berliner Radrouten identifizieren, bin aber in der Jupyter-Einrichtung stecken geblieben.
Weitere Aktivitäten
Viele kleine Mapping-Projekte und Austausch mit anderen hier, z.B. zu Relationen-Editing, Spielplatz- und Detailmapping
Mlvln: Busroutenrelationen und How-to-Video
Neben den von Alex aufgeführten Themen habe ich folgendes gemacht:
Busroutenrelationen in JOSM
Alex hat mir an einem Beispiel einer ungemappten Verkehrsinsel gezeigt, wie ich Busroutenrelationen in JOSM anpasse.
How-to-Map-Video
Für das How-to-map-Video habe ich die ersten Grafiken mit Inkscape erstellt. Diese sollen dann mit Friction noch animiert werden.
Fahrradroutenrelationen repariert
Eserte hat in einer Note darauf hingewiesen, dass an einer Kreuzung Fahrradroutenrelationen defekt sind. Ich habe sie bearbeitet.
Vorher - defekte Fahrradroutenrelationen
Nachher - reparierte Fahrradroutenrelationen
Oliver: Vektortiles-Layer für die Obstbaumkarte
Angefangen, Vektortiles-Layer für die Obstbaumkarte zu entwickeln.
Tobias K.: JOSM-Style und OSM2World-Bugs
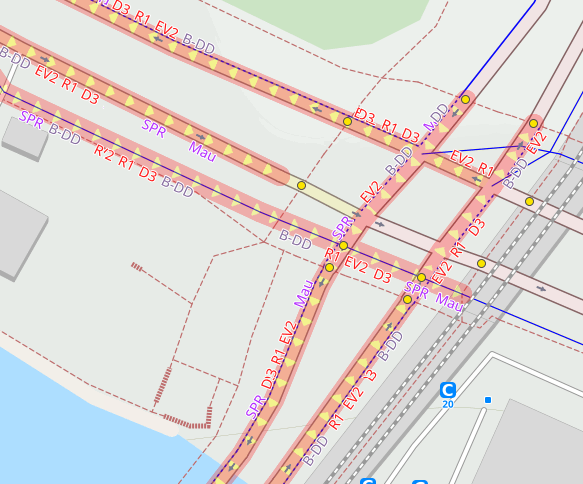
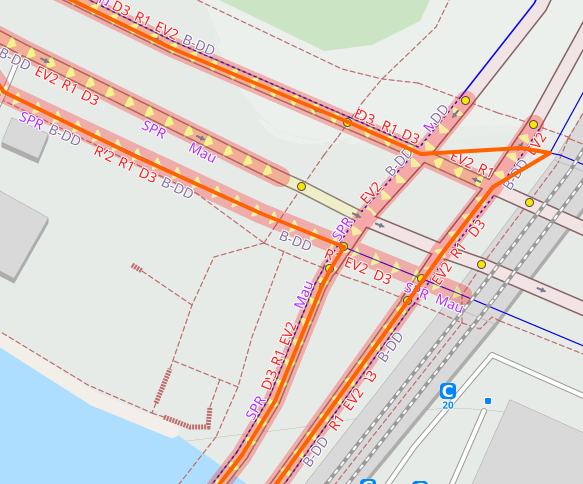
JOSM-Style zur Visualisierung von direction-Tags
JOSM-Style zur Visualisierung von direction-Tags gebastelt und veröffentlicht
OSM2World-Bugfixes
Texturkoordinaten-Bugs in OSM2World gefixt
FOSSGIS 2026 Programmbeiträge
Programmpunkte für die FOSSGIS 2026 eingereicht:
- Lightning Talk zu 3D-Mapping-Werkzeugen
- BoF-Session zu Indoor mit Volker
JOSM-Tests
Test der verbesserten Stockwerks-Knöpfe in JOSM
Weitere Aktivitäten
Austausch zu Straßenraumdarstellungen
uMap: Server-Umzug und neue Features
Server Neuigkeiten
Was bereits vor über einem Jahr begonnen wurde, steht nun kurz vor dem Abschluss: der Umzug von umap.openstreetmap.de auf einen neuen Server.
Die FOSSGIS-Admin-Gruppe hat das Deployment mit Ansible automatisiert, wodurch zukünftige Serverwechsel deutlich einfacher werden. Alle Daten werden regelmäßig gesichert und auf einem externen Speicher gesichert.
Da pro Woche knapp 600 Nutzer aktiv an ca. 1500 Karten arbeiten, muss der Umzug sorgfältig geplant werden. Während des Umzugs wird die Webseite in den Read-Only-Modus geschaltet, ein Backup erstellt, auf dem neuen Server wiederhergestellt und dann erfolgt der DNS-Wechsel. Dieser Prozess wurde bereits mehrfach erfolgreich getestet.
Mit dem Umzug wird uMap von Version 2.9.3 auf Version 3.6.3 aktualisiert und bringt viele neue Funktionen mit sich.
Neue uMap-Features
Karten Templates
Eine Karte kann nun als Vorlage gespeichert werden Karten Templates in uMap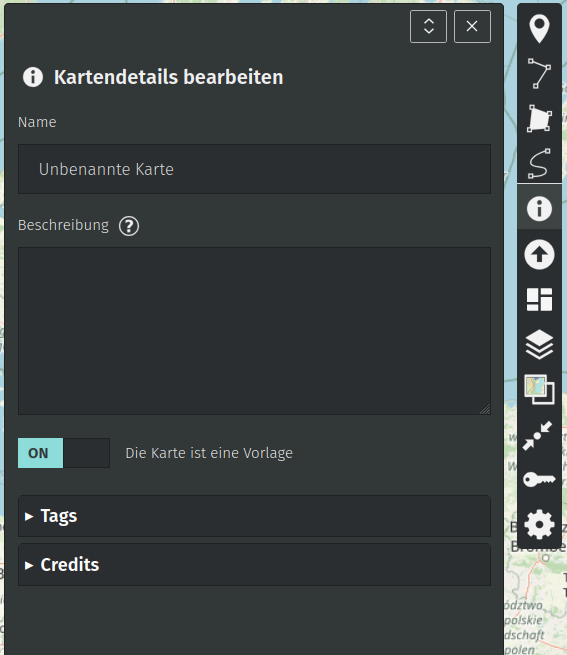
Linienstyling
Text entlang einer Linie kann rotiert, skaliert, wiederholt werden #2706 Erweiterte Linienstyling-Optionen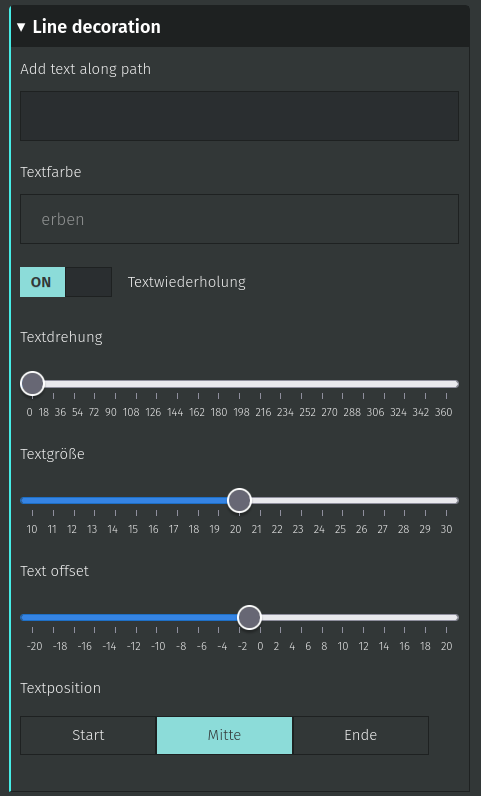
Filter für Datenlayer
Datenlayer können nun nach bestimmten Kriterien gefiltert werden, um nur relevante Objekte anzuzeigen. #2868, #2981
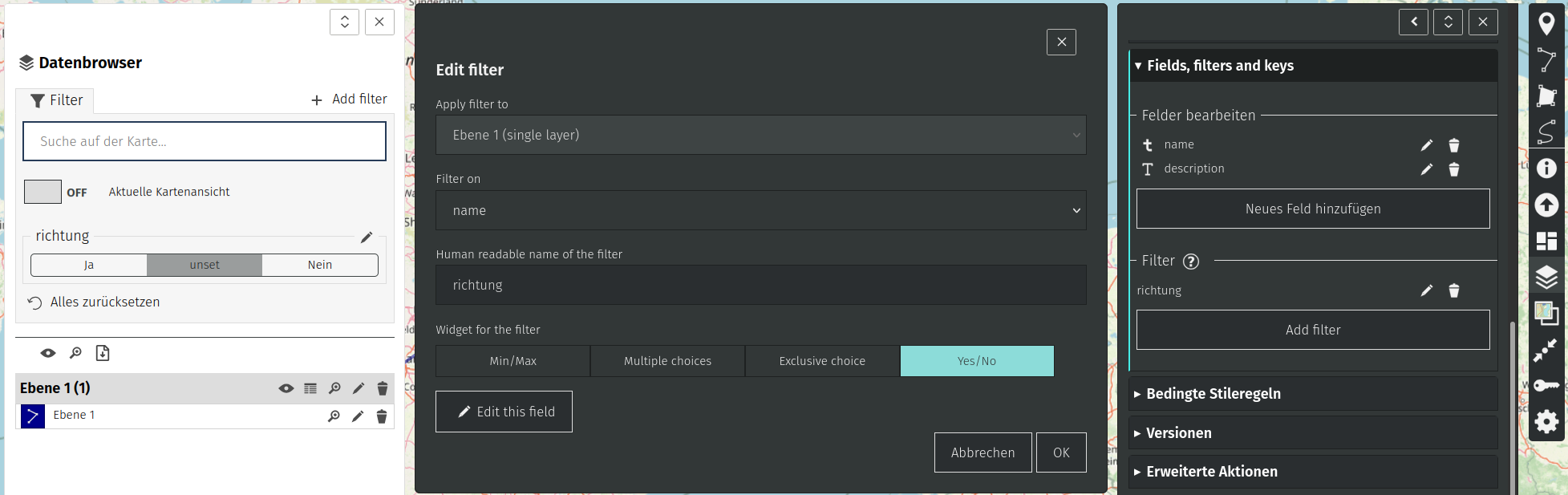
Filter-Funktionen für Datenlayer
Attributbasiertes Styling
Objekte können basierend auf ihren Attributen automatisch unterschiedlich dargestellt werden. #2771 Attributbasiertes Styling von Objekten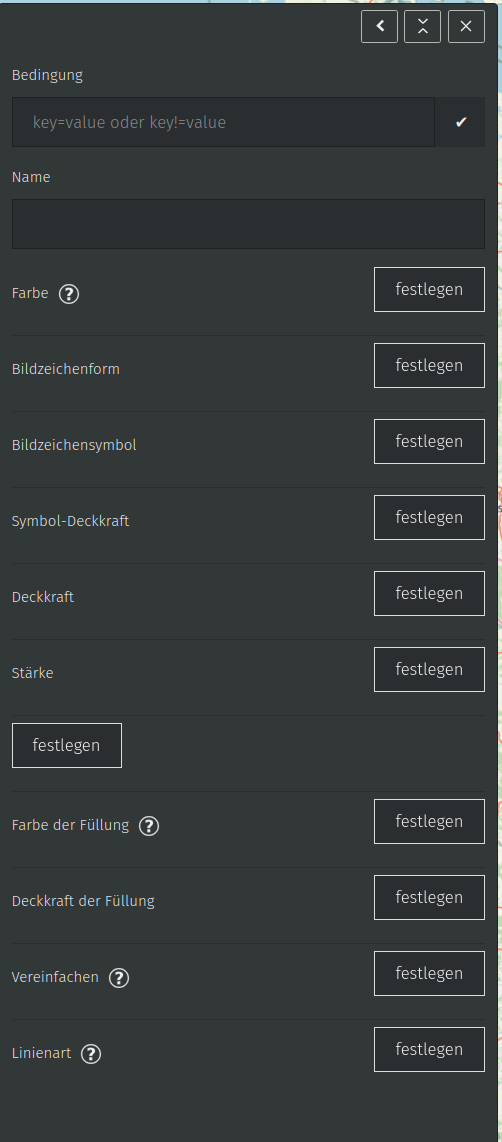
Suchergebnis einfach zur Karte hinzufügen
Verbesserte Suchfunktion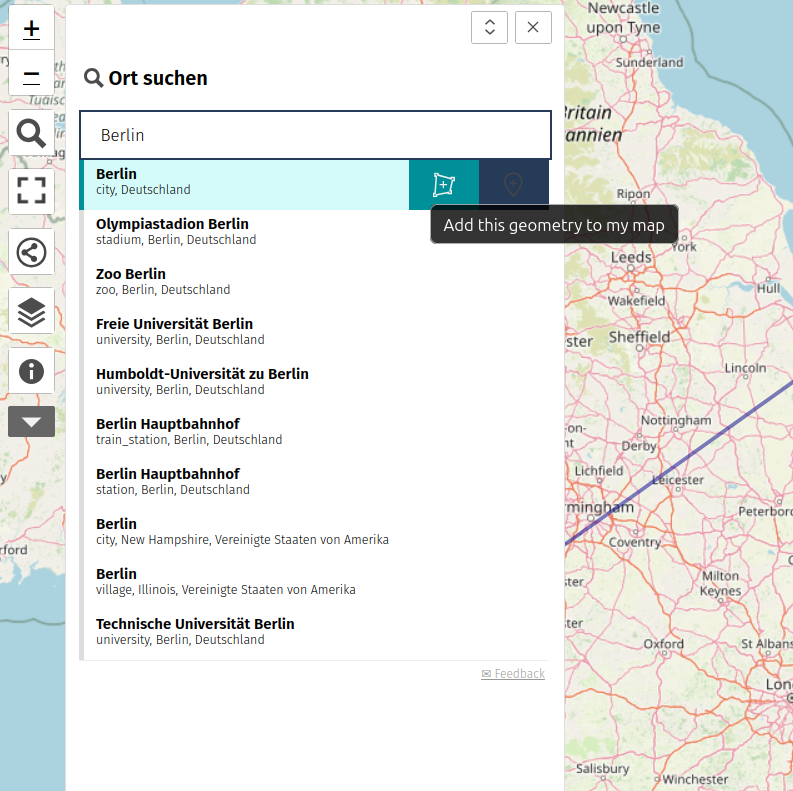
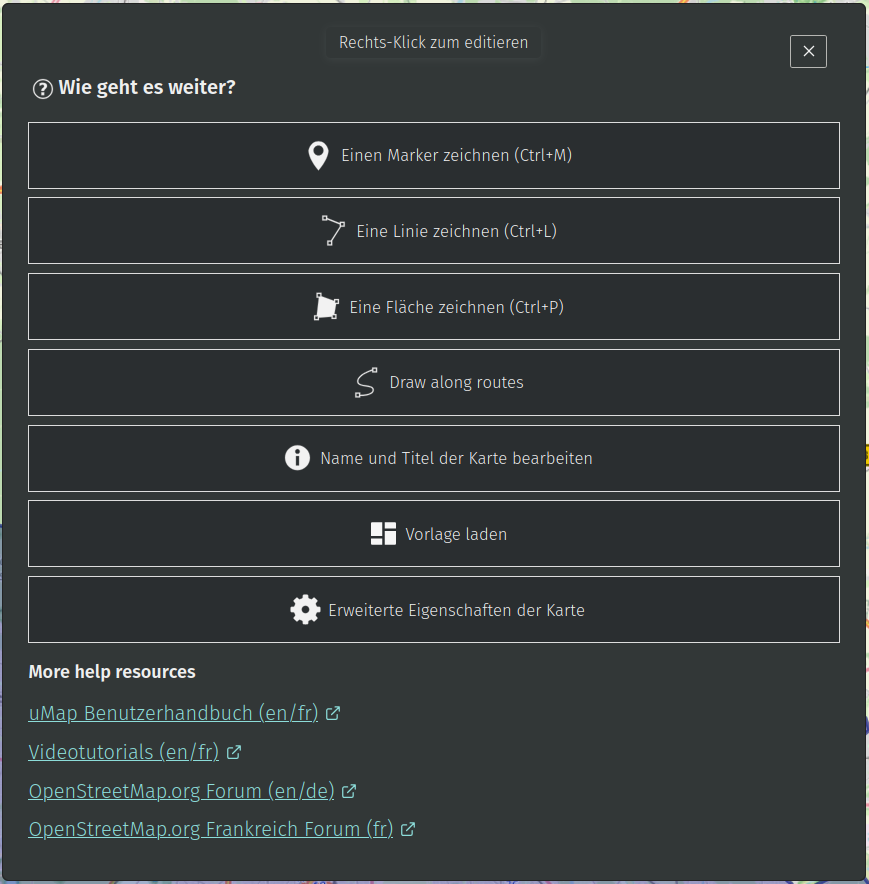
Verbesserte Information bei Erstellung einer anonymen Karte
#2954 Verbesserte Benutzerführung für anonyme Karten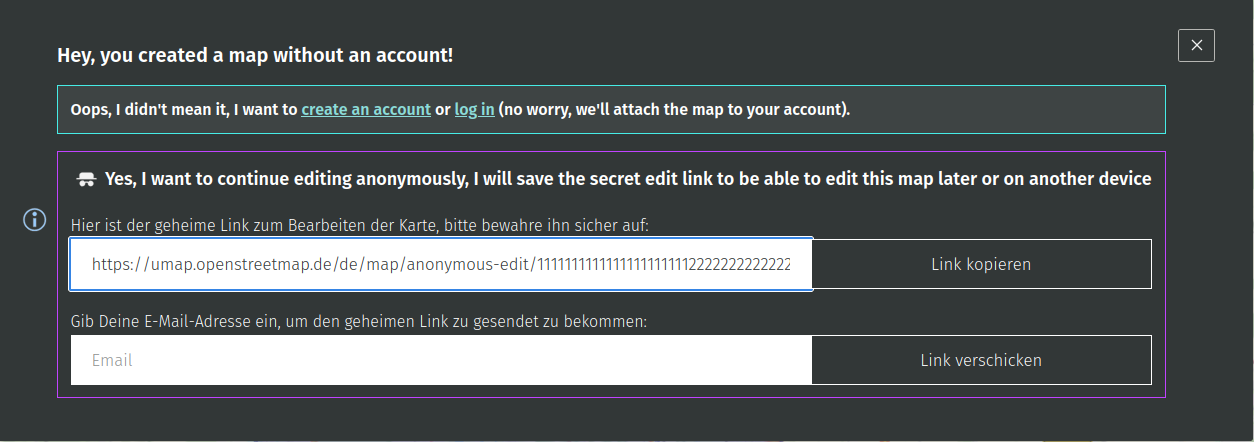
Gemeinsames Bearbeiten einer Karte
Kollaborative Bearbeitung von Karten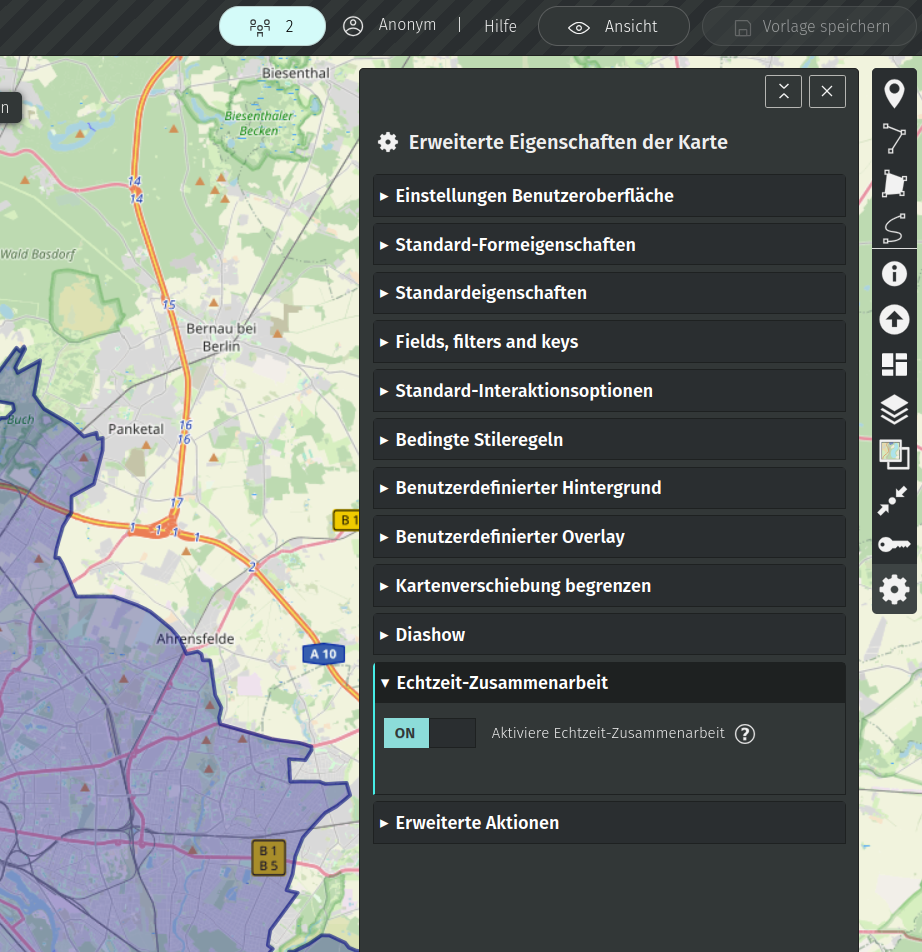
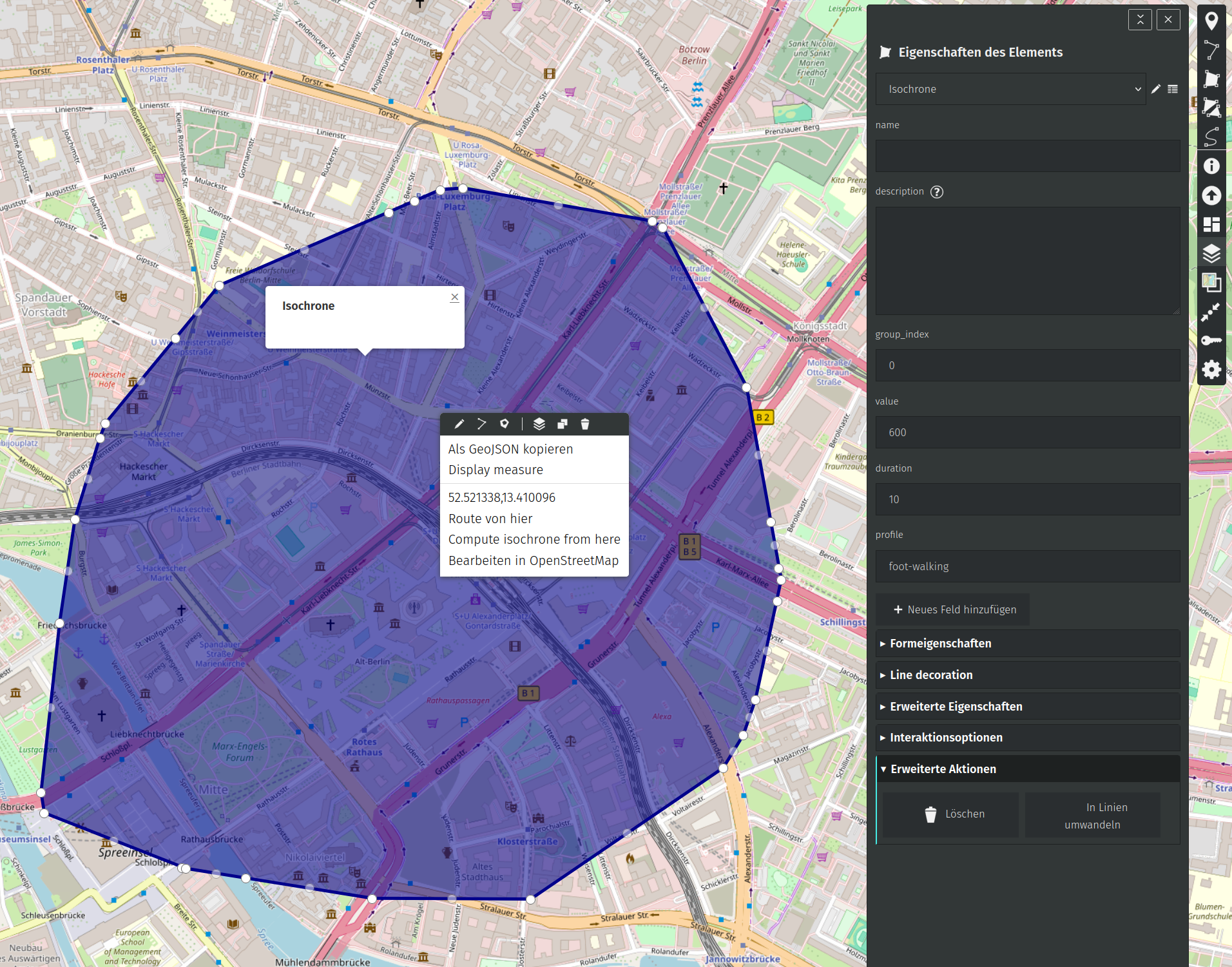
OpenRouteService Integration
Routen zeichnen, Isochronen berechnen und Höhenangaben entlang von Linien abrufen #2839, #2828, #2835
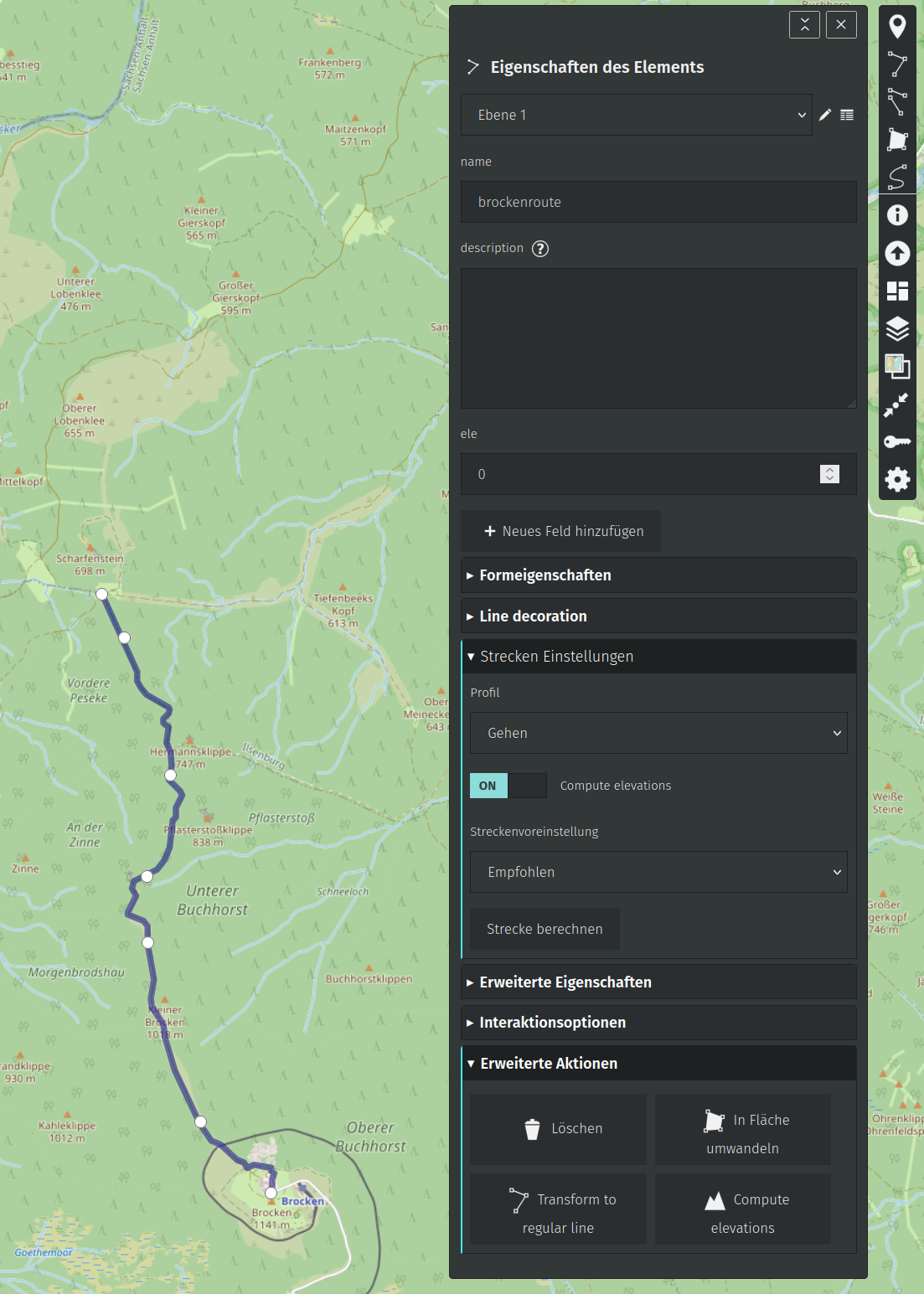
Routing-Funktionen mit OpenRouteService
CSV Import und Export mit WKT Geometrie
Verbesserte CSV-Funktionalität mit Unterstützung für Geometrie-Spalten und WKT-Export. #2788, #2962